
Il robot Marm, 'carpentiere' spaziale con tre arti VIDEO
Si chiama Marm il nuovo robot con tre arti destinato ad aiutare gli astronauti nell'assemblaggio e nella manutenzione delle infrastrutture spaziali: può afferrare, manipolare, trasportare e assemblare moduli pesanti mentre si muove, anche in assenza di gravità. Realizzato dai ricercatori dellIstituto Italiano di Tecnologia (Iit) nellambito del progetto Mirror (Multi-arm Installation Robot for Readying ORUs and Reflectors) finanziato dall'Agenzia spaziale europea (Esa), sarà testato in scenari di simulazione per prepararlo ad applicazioni reali.
Il robot è stato disegnato e realizzato dallo Human and Humanoid Centered Mechatronics Lab dellIit a Genova, coordinato da Nikolaos Tsagarakis, in collaborazione con Leonardo S.p.A e Gmw. Marm è lultima creazione del team di ricerca di Tsagarakis, già autore del robot umanoide Walk-man e del robot Centauro, e attualmente al lavoro sullo sviluppo dei robot collaborativi modulari e configurabili Concert, finanziati dallUnione Europea.
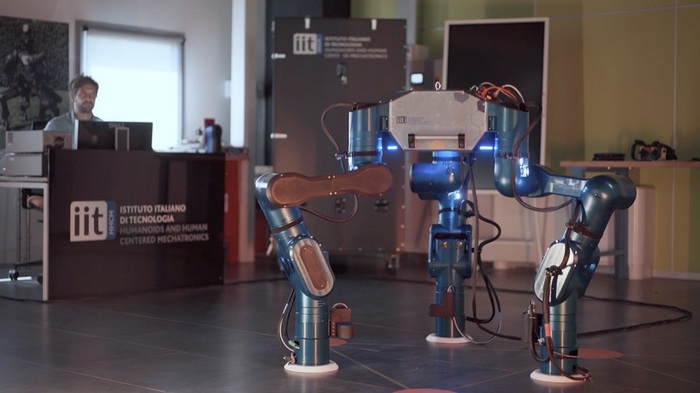
La piattaforma robotica Marm è costituita da un corpo centrale, tre arti e un dispositivo di espansione, utile sia per lalimentazione che per ricevere e spedire dati. La sua struttura è stata realizzata seguendo un disegno realizzato al computer, considerando due criteri chiave: la mobilità e la flessibilità.
Il robot può usare i tre arti per muoversi nellambiente, afferrando le strutture standard presenti nelle stazioni spaziali e strisciandovi sopra, e per assemblare e posizionare componenti (come per esempio i moduli esagonali di circa 12 chilogrammi) o manipolare le unità di sostituzione orbitale. Lo scenario di utilizzo prevede che il robot Marm sarà capace di usare i propri componenti elettronici, grazie anche a un continuo ritorno sensoriale dallambiente, di afferrare un carico da un magazzino, spostarsi mentre lo porta, assemblarlo e posizionarlo nel posto desiderato.